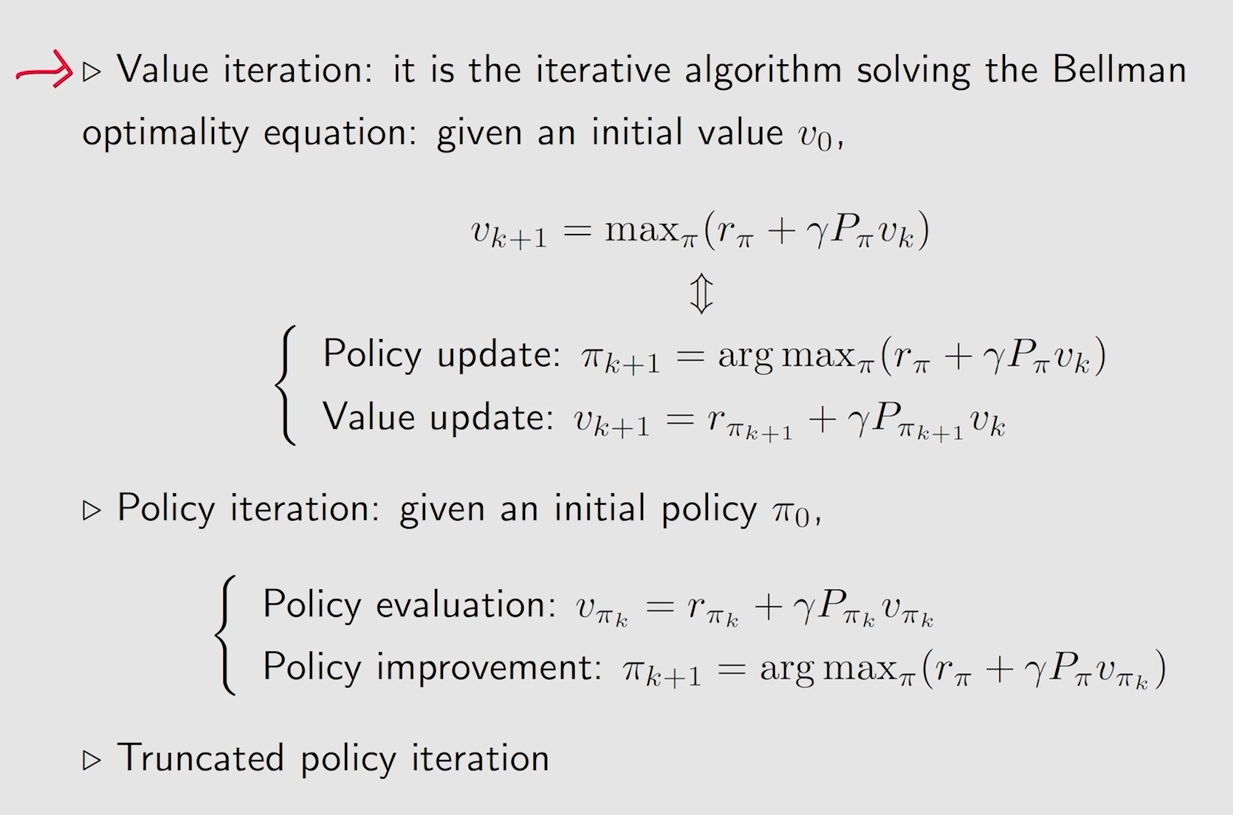
Value iteration(值迭代)

分为两个步骤:
先通过给定Vk得到Πk+1
然后再通过Πk+1求解出用于下次迭代的Vk+1
这里的Vk和Vk+1是一个估计的 state value,到迭代到最后收敛了,就是真实的 state value
Policy update

通过比较不同的action value,选取最大的那个action value的概率为1,则就可以取得这个部分的最大值
Value update

最后的这个Vk+1就是qk里面的最大值,因为除了最大值,其他的部分都是Policy概率都为0
过程总结

步骤:
首先假定一个还没有收敛的Vk
对于状态空间中的所有state的所有action,进行计算出action value
然后选择最大的action value的那个action作为Policy(Policy update)
然后使用所选择的Policy进行计算V-value(Value update),实际上的V-value就是那个最大的qk,也就是最大的action value
例子



通过不断地迭代,就会选择到所有action中最好的一个action,也就是一个最优的Policy
Policy iteration(策略迭代)

步骤:
Policy evaluation:通过首先给出Policy,然后使用贝尔曼公式计算对应的state value,这样的一个过程就叫做Policy evaluation
Policy improvement:对上一步求解出来state value做一个优化问题,从而得到一个新的,并且比之前更好的Policy


Q1:怎么做Policy evaluation

A1:通过使用贝尔曼方程,用求逆矩阵或者迭代的方法来求出在这个策略下的state value
Q2:为什么我得到的新策略一定比老策略好?

Q3:为什么迭代算法一定能找到一个最优的策略

每次迭代过后的state value值都会更大,这个值大到最后就会逐渐的趋近于收敛,也就是我们最优解
Q4:Policy evaluation与Value iteration的关系

具体实现

依然是先设定一个state value,然后进行不断地迭代,最终求解出实际的state value

实际上就是贝尔曼最优方程之中的求最优解的那一步
也就是先计算出一个状态下的所有action value,然后选取一个最大的action value,然后将策略更新为选取那个action的概率为1

例子1
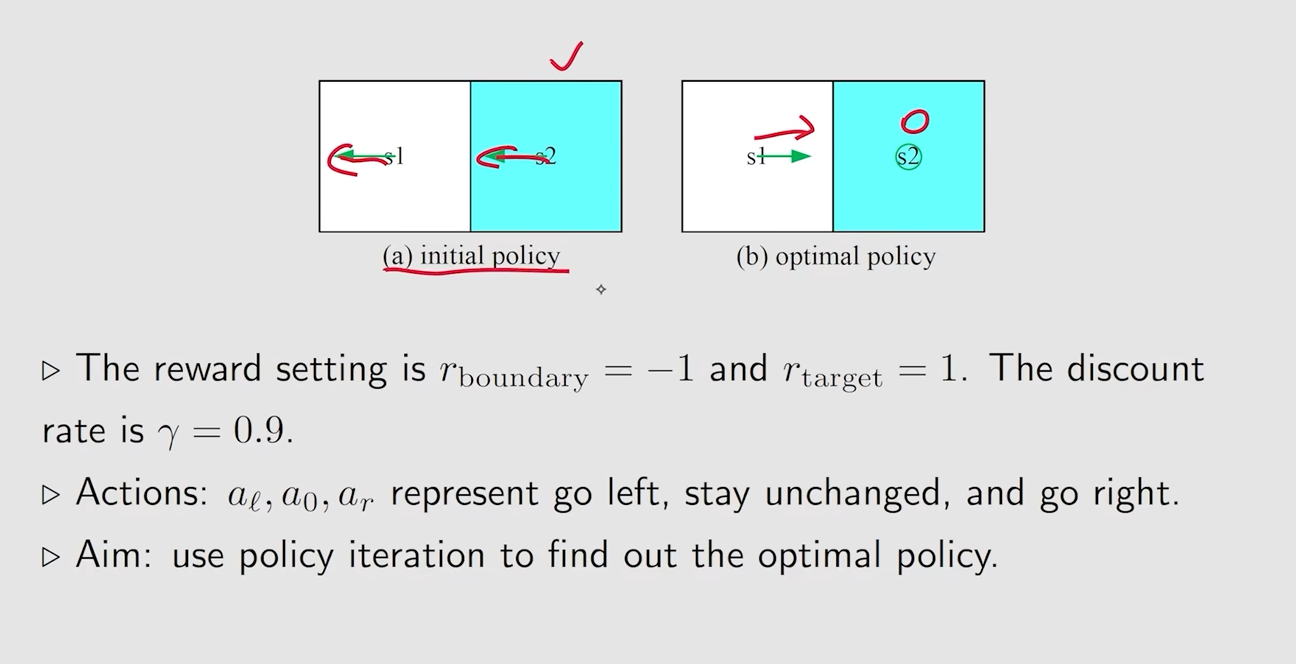


例子2


当周围没有状态到达目标区域时,更新也无法到达目标区域,当周围有状态到达目标区域时,就会逐渐更新从而到达目标区域
小总结
Value Iteration是不断的迭代state value,使得最终的state value进行收敛,从而得到最优策略 Policy Iteration是不断的迭代Policy,使得Policy不断收敛,从而得到最优策略
Truncated policy iteration




在第四步时:
在策略迭代中,求解需要进行迭代,依然是相当于求一个贝尔曼公式
在值迭代中,可以进行直接求解,因为没有未知数
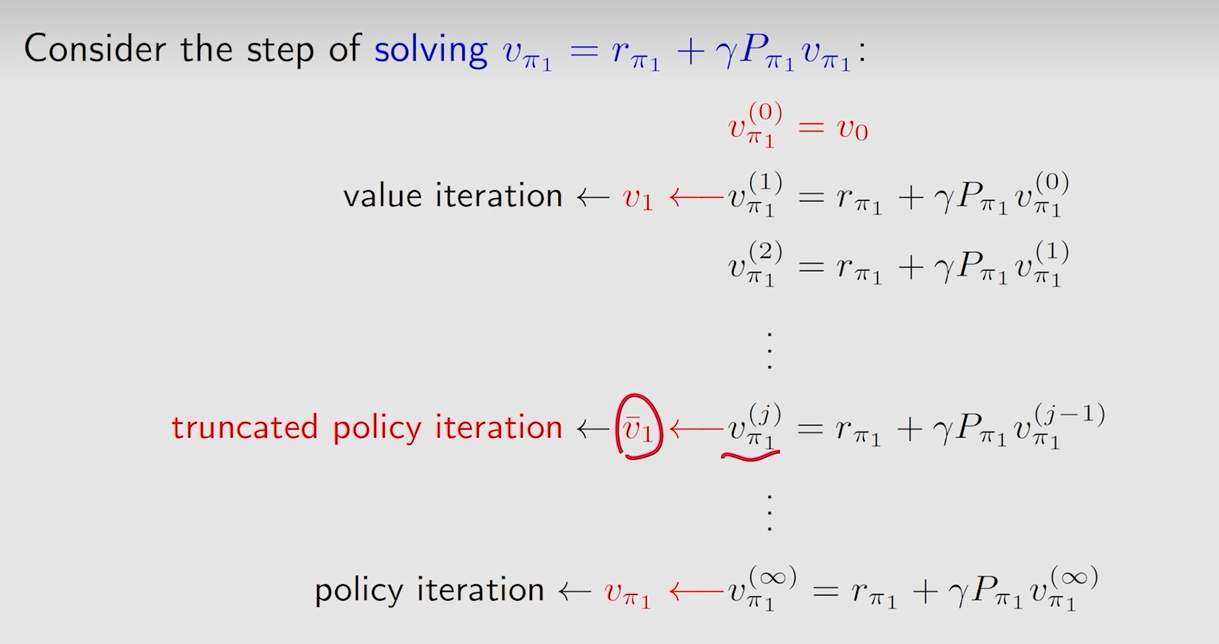
如果设置在策略迭代时的最开始的VΠ1 = V0(值迭代的初始预估值)
那么第一次迭代后的VΠ1实际上就等于了V1
所以实际上策略迭代与值迭代就只有一步不相同,就是在上面第四步,在这个第四步中,值迭代可以看作就是策略迭代中的第一步
而策略迭代实际上就是迭代了无穷次之后所计算出来的VΠ1
如果用一般化的方法来描述这个不走,从而对于使用中间步骤的VΠ1的方法,我们称之为truncated police iteration
伪代码

与策略迭代是一样的伪代码,只是在判断条件上变成了判断是否达到了所设定的迭代次数,从而判断是否继续迭代下去

无论如何随着迭代都会逐渐的增大state value,所以就算只进行有限步,也是在逐渐收敛的过程中,只是说收敛程度不同

Policy iteration算法因为在中间步骤就已经迭代到了最优,所有收敛速度会是最快的
相对的,Value iteration算法因为在中间步骤只做了第一步收敛运算,所以收敛速度是最慢的
而 Truncated police iteration的收敛速度位于两者中间,取决于迭代步数多少的设置
总结