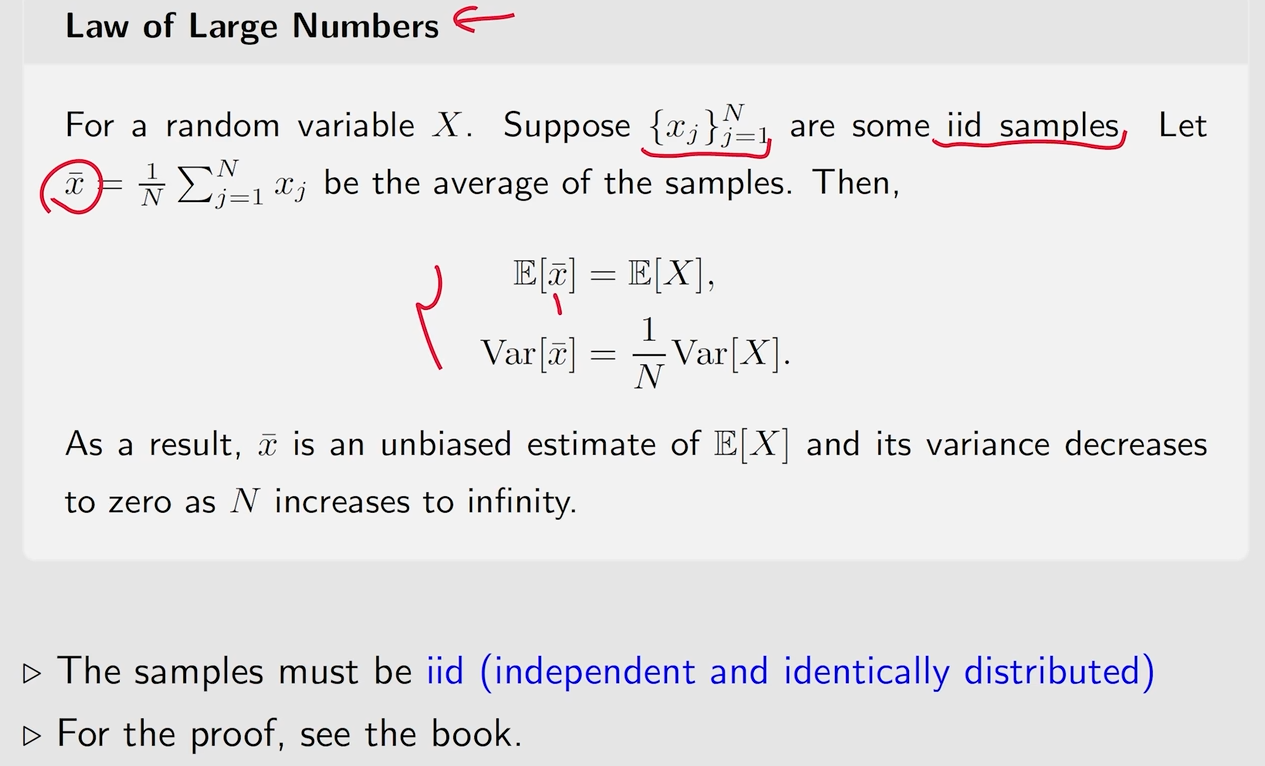
理论支撑(大数定理)
Simplest MC-based RL algorithm
将Policy iteration改为model-free的(核心点)
对于Policy iteration来说,怎么样得到新的策略Π,就是找到这个qΠk的最大值
最核心的量就是这个qΠk,也就是这个action value
如何求解qΠk(action value)
方法一:依赖于模型的算法
实际上就是一个value iteration的方法
方法二:不依赖于模型的方法
action value最初的定义实际上就是,在状态s时,take action a,然后得到一个return,然后这个return是一组随机数据,然后对他们求加权平均(期望)
那么这就变成了一个求期望的问题,对于求期望的问题,就可以使用蒙特卡洛的方法来做
MC-basic的定义

首先从状态s take action a 后following policy Πk,得到一条episode
然后选取这跳episode中的一个discounted return(因为初始动作确定,对于后续的状态和奖励也会因为随机性而不同,因为没有模型)
这个discounted return实际上就是这个action value中的一次采样(experience)
然后求得很多个discounted return之后,就可以通过大树定理求解出action value

Simplest MC-based RL algorithm总体来说和策略迭代是一样的,区别就在于第一步求解action value的时候,因为没有模型,所以直接使用蒙特卡洛的方法去进行采样,然后求解出action value(Policy evaluation) 然后选取一个最大的action value,然后将策略更新为选取那个action的概率为1(Policy improvement)
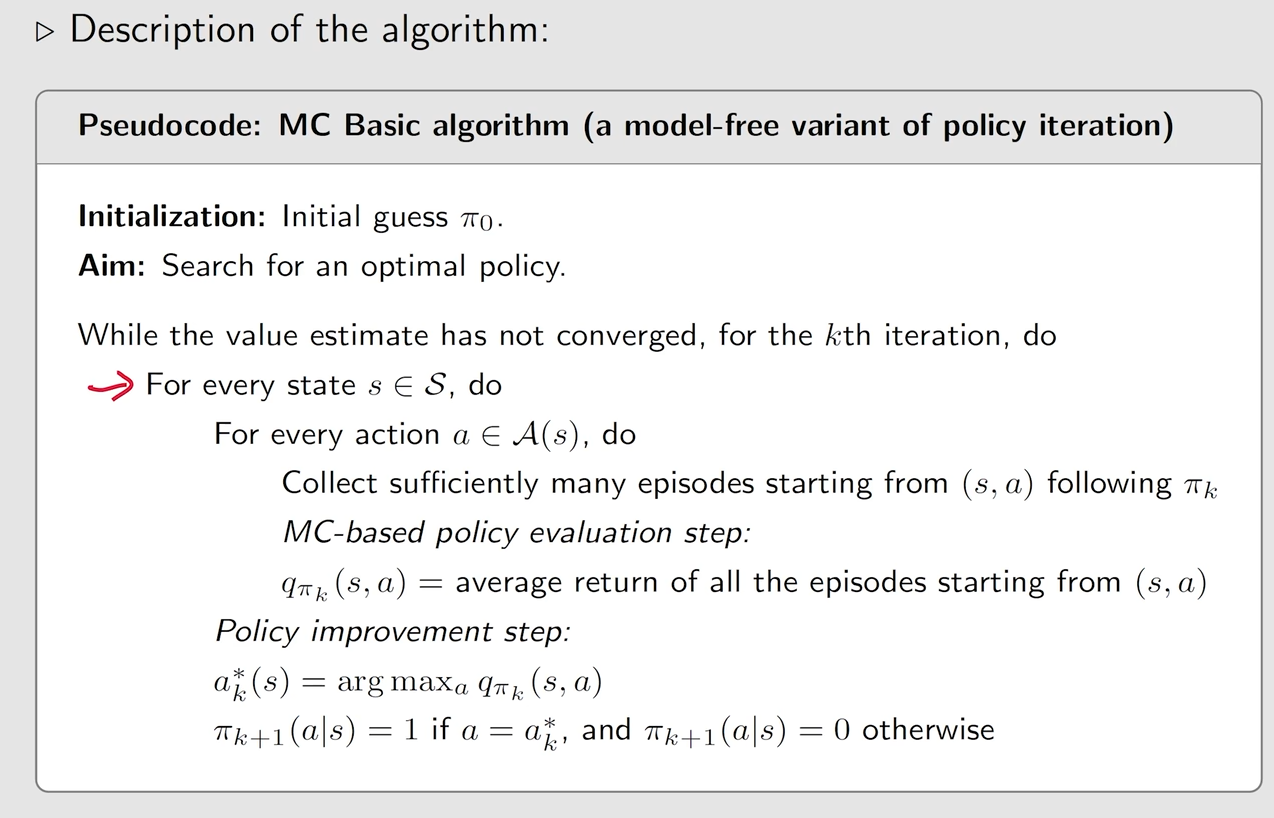
伪代码:
对每一个state的每一个action都进行一个action value的计算(使用MC-based)
然后选取一个最大的,然后将策略更新为选取那个action的概率为1
MC-basic的例子





MC-basic的例子2


如果episode的长度为1,实际上就只探索了一个四联通区域,所以只有距离目标最近的几个state能选取到正确的action



当episode length很短的时候,就只有靠近了目标的几个状态会选择到非零的state value
当episode length加长时,随着长度的增加,越来越远的状态也会得到state value
所以episode length需要选择足够充足的长
MC Exploring Start
用于将MC-basic变得更加的高效

把每一次的S与a设定为一次Visit,比如上面的S1与a2就是一组Visit
在MC-basic中所使用的策略交错initial-visit,也就是只考虑s1,a2,用剩下的return(s2,a4、s1,a2、s2a3等)来估计s1,a2的action value
这样做的问题是浪费了这个episode中的很多数据

不单单用来估计s1,a2,在s1,a2后面的部分的数据可以用来估计s2,a4
first-visit method: 如上图所示,s1,a2出现了两次,那么第一次估计出结果后,就不会再使用第二次进行估计
every-visit method: 在每一次s1,a2出现时都进行重新估计

在MC-basic方法中,等待求出所有的episode的return之后再进行加权平均然后再优化
但是效率更高的的方法是,在得出一次episode的return之后,就直接开始求action value,然后就直接开始做优化

在GPI中,就是不断地进行策略评估和策略优化的转换,没得到一次episode就会得到一个return然后直接开始求action value,然后进行优化

t是从后往前计算是为了提高计算效率
对每一条的episode,先初始化g=0
然后计算这个episode中每一步的return
然后action value就是这些return的加权平均
然后再通过选取最大的一个action value的那个action作为Policy来改进策略

理论上,只有充分探索了每个状态的每个动作值,我们才能正确地选择最佳动作。相反地,如果一个行动没有被探索,这个行动可能恰好是最优的,因此被错过了。
在实践中,探索起步是很难实现的。对于许多应用程序,特别是那些涉及与环境的物理交互的应用程序,很难从每个状态-动作对开始收集情节。
MC Epsilon-Greedy算法
soft policy

可以通过几个很长的episode可以将每个state action 都覆盖到

给最好的action的概率很大,而其他的action也给概率,但是概率相对较小
exploitation的含义是指,对于一个state上始终选取目前action value最大的那个action,用于更充分的利用这个action value
exploration的含义是指,对于一个state上有可能不去选取action value最大的那个action,这样用于更充分的去探索其他action,因为其他action有可能在之后的探索中会变成最大的action value
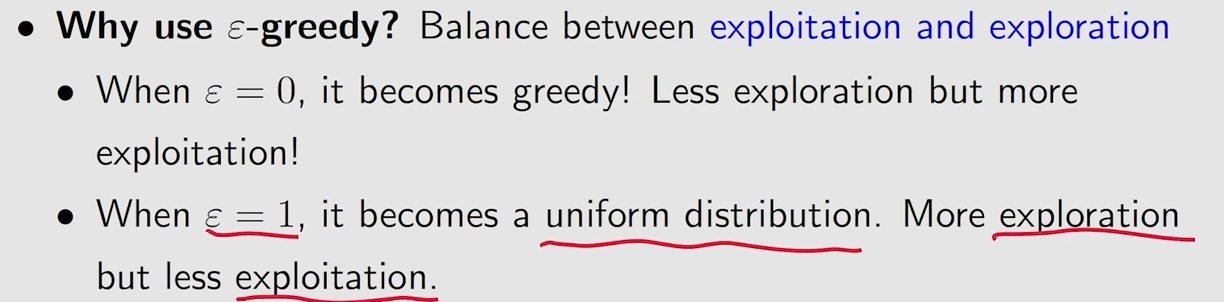
这里的可能性就由Epsilon决定,
当Epsilon越接近于0,则算法更倾向于一直利用最大的那个action
当Epsilon越接近于1,则算法更倾向于去探索其他的action
具体定义


与MC Exploring Start算法基本是一样的,区别就在于Policy improvement这一步中,MC Epsilon-Greedy算法将会给每一种action都有一些概率,而不是只给action value最大的那个值的概率直接为1

这个地方要用every-visit,因为有时候有些visit被访问了很多次,如果我们只用一次进行估计,就会有些浪费
例子


例子


优点:具有较强的探索能力,不需要对开始条件有要求,也就是说,我们可以从任意一点开始,然后选取一个或者几个点就可以探索完所有的action,并且得出一个相对最优的Policy
缺点:为了上面的优点,所牺牲的部分实际上就是Policy的最优性,所以这样最后得到的Policy实际上不是最优的
最优性
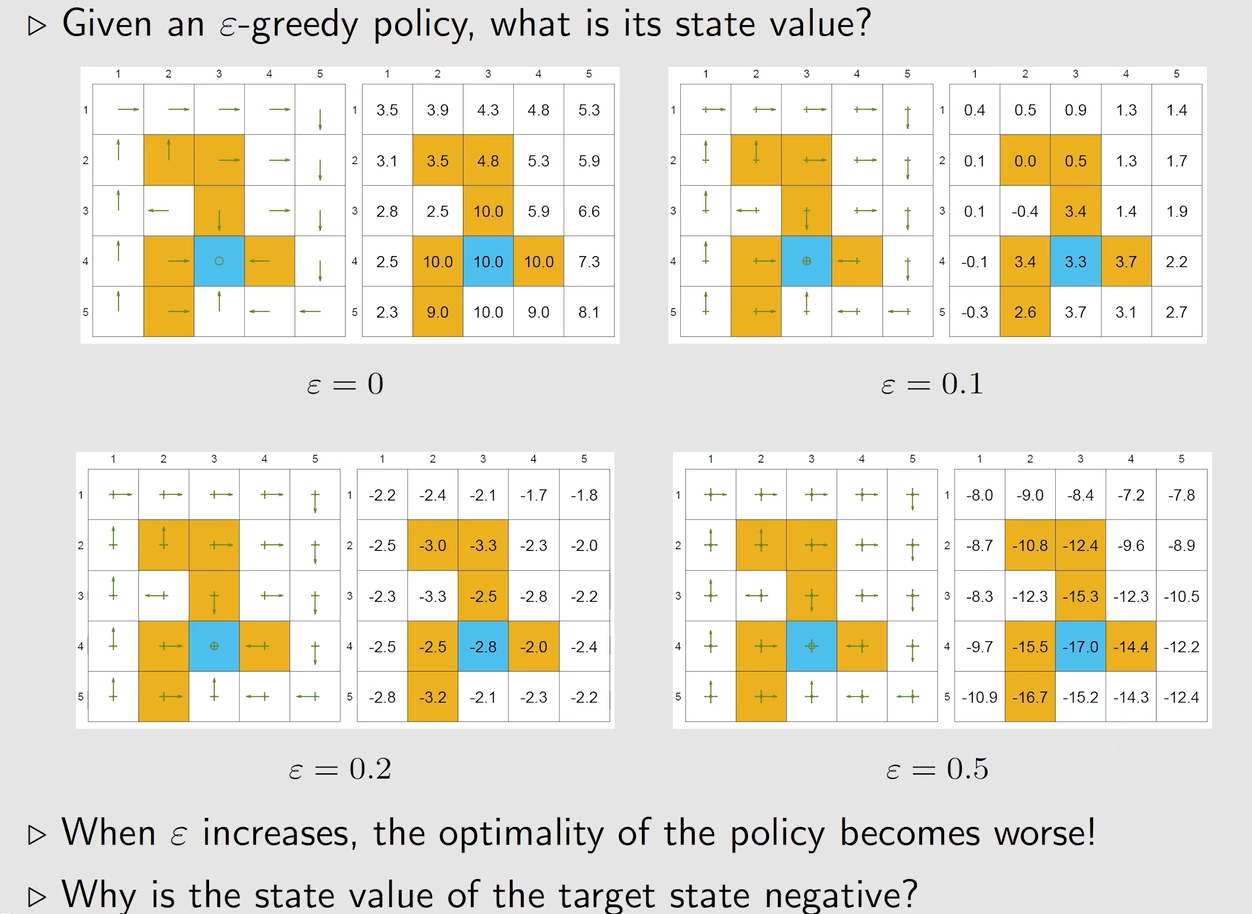
如果Epsilon过大,会逐渐降低最优性

如果想要得到一个相对好的Policy,一个做法就是在最开始时增加Epsilon用于探索,然后逐渐逐渐的降低Policy,使得最后可以得到一个最优的确定策略
总结